In stappenmotor is in elektromotor dy't elektryske enerzjy omset yn meganyske enerzjy, en it útfierkoppel en de snelheid kinne presys wurde regele troch de stroomfoarsjenning te kontrolearjen.
Ik, de foardielen fan in stapmotor
Hege presyzje
De rotaasjehoeke fan 'e stappenmotor is evenredich mei it oantal ynfierpulsen, sadat it mooglik is om it oantal en de frekwinsje fan pulsen presys te kontrolearjen om krekte kontrôle oer de posysje en snelheid fan 'e motor te berikken. Dizze eigenskip makket stappenmotoren útsûnderlik yn tapassingen dy't hege presyzje posysjonearring fereaskje, lykas CNC-masine-ark, printpersen en tekstylmasines.
Stappenmotors hawwe meastal in krektens fan tusken de 3% en 5% per stap en sammelje de flater net op fan 'e foarige stap nei de folgjende, d.w.s. se generearje gjin kumulative flaters. Dit betsjut dat stappenmotors in hege posysjonele krektens en bewegingswerhellingsberens kinne behâlde oer lange perioaden of trochgeande beweging.
Heech kontrolearber

De operaasje fan 'e stappenmotor wurdt berikt troch it kontrolearjen fan 'e pulsstroom, sadat de kontrôle fan 'e motor realisearre wurde kin fia softwareprogrammearring. Dizze programmeerberens makket it mooglik foar stappenmotors om te foldwaan oan 'e behoeften fan in breed ferskaat oan tapassingen, lykas automatisearre produksjelinen, robotika en oare fjilden.
Omdat de reaksje fan 'e stappenmotor allinich bepaald wurdt troch de ynfierpuls, kin iepen-loop kontrôle brûkt wurde, wat de struktuer fan 'e motor ienfâldiger en minder djoer makket om te kontrolearjen. Iepen-loop kontrôle ferminderet ek systeemkompleksiteit en ûnderhâldskosten.
Hege koppel by lege snelheden
Stappenmotors hawwe in hege koppelútfier by lege snelheden, wat se poerbêst makket yn tapassingen dy't lege snelheid en hege koppel fereaskje, lykas automatyske etiketteermasines en ferpakkingsmasines.
Stappenmotors hawwe in maksimaal koppel as se stilsteane, in funksje dy't se foardielich makket yn tapassingen wêr't posysjonele stabiliteit of wjerstân tsjin eksterne lesten fereaske is.
Hege betrouberens

Stappenmotors hawwe gjin boarstels, wêrtroch storingen en lûd troch boarstelslijtage wurde fermindere. Dit makket stappenmotors tige betrouber, wêrby't de libbensdoer fan 'e motor foar in grut part ôfhinklik is fan 'e libbensdoer fan 'e lagers.
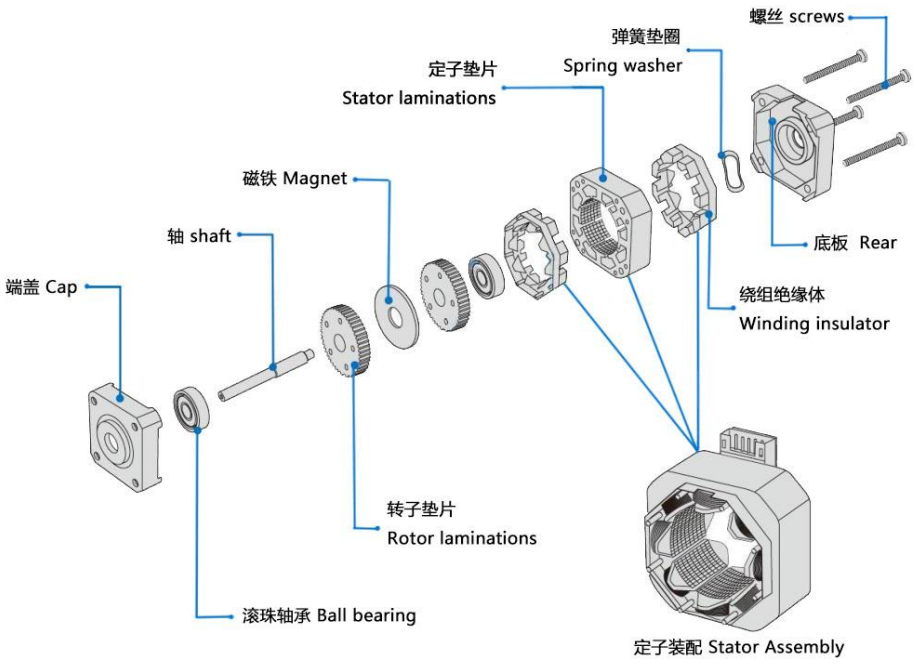
Stappenmotors hawwe in ienfâldige struktuer, besteande út trije dielen: de motor sels, de bestjoerder en de controller, wêrtroch ynstallaasje en ûnderhâld relatyf maklik binne.
Breed snelheidsberik

Stappenmotors hawwe in relatyf fluch snelheidsberik, en de snelheid fan 'e motor kin feroare wurde troch de pulsfrekwinsje oan te passen. Dit makket it mooglik foar de stappenmotor om him oan te passen oan ferskate wurksnelheden en ladingseasken.
Goede Start-Stop en Reverse-Reaksje
Stapmotors reagearje fluch op kontrôlesignalen by it starten en stopjen, en behâlde hege presyzje en stabiliteit by it efterútdraaien. Dizze funksje makket de stapmotor in foardiel by de needsaak foar faak starten en stopjen en omkearen fan 'e tapassing.
II, de neidielen fan stapmotors
Maklik om in stap te ferliezen of te fier te gean
As stappenmotors net goed regele wurde, binne se gefoelich foar út-stap of te folle stap. Út-stap betsjut dat de motor net draait neffens in foarôf bepaald oantal stappen, wylst út-stap betsjut dat de motor mear draait as in foarôf bepaald oantal stappen. Beide ferskynsels resultearje yn in ferlies fan posysjonele krektens fan 'e motor en beynfloedzje de prestaasjes fan it systeem.
It generearjen fan útstap en te folle stap is relatearre oan faktoaren lykas de lading fan 'e motor, de rotaasjesnelheid, en de frekwinsje en amplitude fan it kontrôlesignaal. Dêrom moatte by it brûken fan stappenmotors dizze faktoaren soarchfâldich beskôge wurde en moatte passende maatregels nommen wurde om it foarkommen fan útstap en te folle stap te foarkommen.
Moeilijkheden by it berikken fan hege rotaasjesnelheden
De rotaasjesnelheid fan in stappenmotor wurdt beheind troch syn wurkingsprinsipe, en it is meastentiids lestich om in hege rotaasjesnelheid te berikken. Hoewol it mooglik is om de snelheid fan 'e motor te ferheegjen troch de frekwinsje fan it kontrôlesignaal te ferheegjen, sil in te hege frekwinsje liede ta problemen lykas motorferwaarming, ferhege lûd en kin sels de motor beskeadigje.
Dêrom, by it brûken fan stappenmotors, is it needsaaklik om it passende snelheidsberik te selektearjen neffens de easken fan 'e tapassing en te foarkommen dat jo lange perioaden mei hege snelheden rinne
Gefoelich foar feroarings yn lading
Stappenmotors fereaskje real-time kontrôle fan it oantal en de frekwinsje fan stroompulsen tidens operaasje om krekte kontrôle fan posysje en snelheid te garandearjen. Yn gefal fan grutte feroarings yn 'e lading sil de kontrôlestroompuls lykwols fersteurd wurde, wat resulteart yn instabile beweging en sels ûnkontroleare stappen.
Om dit probleem op te lossen, kin in sletten-loop kontrôlesysteem brûkt wurde om de posysje en snelheid fan 'e motor te kontrolearjen en it kontrôlesignaal oan te passen oan 'e werklike situaasje. Dit sil lykwols de kompleksiteit en kosten fan it systeem ferheegje.
Lege effisjinsje
Omdat stappenmotors regele wurde tusken konstant stopjen en starten, is harren effisjinsje relatyf leech yn ferliking mei oare soarten motors (bygelyks DC-motors, AC-motors, ensfh.). Dit betsjut dat stappenmotors mear stroom ferbrûke foar itselde útfierfermogen.
Om de effisjinsje fan stappenmotors te ferbetterjen, kinne maatregels lykas it optimalisearjen fan kontrôlealgoritmen en it ferminderjen fan motorferliezen brûkt wurde. De ymplemintaasje fan dizze maatregels fereasket lykwols in bepaald nivo fan technology en kostenynvestearring.
III, it tapassingsgebiet fan stapmotors:
Stapmotors wurde in soad brûkt yn in protte fjilden fanwegen har unike foardielen en bepaalde beheiningen. Hjirûnder folget in detaillearre diskusje oer it tapassingsgebiet fan stapmotors:
Robotyk en automatisearringssystemen
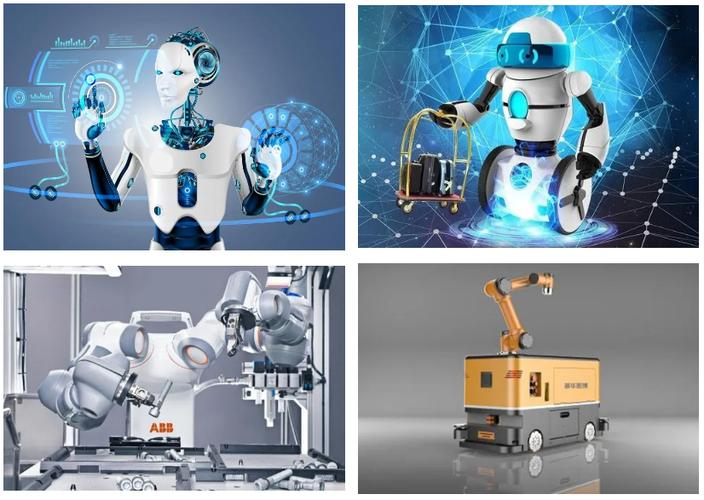
Stapmotors wurde in soad brûkt yn yndustriële robots, automatisearre produksjelinen en oare fjilden. Se kinne de bewegingssnelheid en rjochting fan robots presys kontrolearje en hege-presyzje posysjonearring en rappe reaksje realisearje yn automatisearre produksjeprosessen.
CNC-masjineark

Printers

Stapmotors wurde brûkt om de beweging fan 'e printkop te kontrolearjen yn apparaten lykas inkjet- en laserprinters. Troch de beweging fan 'e motor presys te kontrolearjen, kin tekst- en ôfbyldingsprintsjen fan hege kwaliteit realisearre wurde. Dizze funksje makket stapmotors in soad brûkt yn printapparatuer.
Medyske apparaten

Stapmotors wurde brûkt yn medyske ôfbyldingsapparatuer (bygelyks röntgenapparaten, CT-scanners, ensfh.) om de beweging fan it scanframe oan te driuwen. Troch de beweging fan 'e motor presys te kontrolearjen, kin rappe en krekte ôfbylding fan 'e pasjint realisearre wurde. Dizze funksje makket stapmotors in wichtige rol yn medyske apparatuer.
Loftfeart

Stapmotors wurde brûkt om de beweging fan aktuators yn loftfeartapparatuer te kontrolearjen, lykas satellythâldingskontrôle en raketoandriuwingssystemen. Stapmotors litte goede prestaasjes sjen ûnder de easken fan hege presyzje en hege stabiliteit. Dizze eigenskip makket stapmotors in wichtich ûnderdiel fan 'e loftfeartsektor.
Ferdivedaasje- en gamingapparatuer

Stappenmotors wurde brûkt om de beweging fan aktuators te kontrolearjen yn apparaten lykas lasergraveurs, 3D-printers en spultsjecontrollers. Yn dizze apparaten is krekte kontrôle fan stappenmotors krúsjaal foar it berikken fan in produkt fan hege kwaliteit en in geweldige brûkersûnderfining.
Underwiis en ûndersyk

Stappenmotors wurde brûkt om de beweging fan eksperimintele platfoarms te kontrolearjen yn senario's lykas laboratoariumynstruminten en ûnderwiisapparatuer. Yn it ûnderwiis meitsje de lege kosten en hege krektens fan stappenmotors se ideale ûnderwiisynstruminten. Troch gebrûk te meitsjen fan de krekte kontrôlekarakteristiken fan stappenmotors kinne se studinten helpe om natuerkunde en yngenieursprinsipes better te begripen.
Gearfetsjend hawwe stappenmotors de foardielen fan hege presyzje, kontrolearberens, lege snelheid en hege koppel, en hege betrouberens, mar se hawwe ek de neidielen dat se maklik út 'e pas of út 'e pas binne, lestich binne om hege rotaasjesnelheden te berikken, gefoelich binne foar feroarings yn lading, en lege effisjinsje. By it selektearjen fan stappenmotors is it needsaaklik om har foar- en neidielen te beskôgjen, lykas it tapassingsgebiet neffens de tapassingseasken om de prestaasjes en stabiliteit fan it systeem te garandearjen.
Pleatsingstiid: 14 novimber 2024