Sletten lusstappenmotorshawwe de prestaasjes-kostenferhâlding yn in protte bewegingskontrôle-tapassingen feroare. It súkses fan 'e VIC sletten-loop progressive motors hat ek de mooglikheid iepene om djoere servomotors te ferfangen troch goedkeapestappenmotorsYn in tanimmend oantal hege standert yndustriële automatisearringstapassingen feroarje technologyske foarútgong de prestaasjes-kostenferhâlding tusken stappenmotors en servomotors.
Stapmotors tsjin servomotors
Neffens konvinsjonele wiisheid prestearje servokontrôlesystemen better yn tapassingen wêr't snelheden fan mear as 800 RPM en in hege dynamyske respons fereaske binne. Stappenmotors binne geskikter foar tapassingen mei legere snelheden, lege oant middelgrutte fersnelling en hege hâldkoppel.
Dus wat is de basis foar dizze konvinsjonele wiisheid oer stappenmotors en servomotors? Litte wy it hjirûnder yn mear detail analysearje.
1. Ienfâld en kosten
Stappenmotors binne net allinnich goedkeaper as servomotors, se binne ek ienfâldiger yn gebrûk te nimmen en te ûnderhâlden. Stappenmotors binne stabyl by stilstân en hâlde har posysje (sels mei dynamyske lesten). As lykwols hegere prestaasjes nedich binne foar bepaalde tapassingen, moatte djoerdere en kompleksere servomotors brûkt wurde.
2. Struktuer
Stapmotorsdraaie stapsgewiis, mei magnetyske spoelen om stadichoan in magneet fan de iene posysje nei de oare te lûken. Om de motor 100 posysjes yn elke rjochting te ferpleatsen, fereasket it circuit dat 100 stapoperaasjes op 'e motor útfierd wurde. Stappenmotors brûke pulsen om ynkrementele bewegingen te berikken, wêrtroch presys posysjonearring mooglik is sûnder gebrûk fan feedbacksensors.
De bewegingsmetoade fan 'e servomotor is oars. Hy ferbynt in posysjesensor - dus in encoder - mei de magnetyske rotor en detektearret kontinu de krekte posysje fan 'e motor. De servo kontrolearret it ferskil tusken de werklike posysje fan 'e motor en de ynstruearre posysje en past de stroom dêrop oan. Dit sletten-loopsysteem hâldt de motor yn 'e juste bewegingssteat.

3. Snelheid en koppel
It ferskil yn prestaasjes tusken stapmotors en servomotors komt troch har ferskillende motorûntwerpoplossingen.Stapmotorshawwe in folle grutter oantal poalen as servomotors, sadat in folsleine omwenteling fan in stappenmotor folle mear wikkelstroomútwikselingen fereasket, wat resulteart yn in rappe daling fan it koppel by tanimmende snelheden. Derneist, as it maksimale koppel berikt wurdt, kin de stappenmotor syn snelheidssynchronisaasjefunksje ferlieze. Om dizze redenen binne servomotors de foarkarsoplossing yn de measte hege-snelheidstapassingen. Yn tsjinstelling, it hegere oantal poalen fan in stappenmotor is foardielich by legere snelheden, as de stappenmotor in koppelfoardiel hat boppe in servomotor fan deselde grutte.
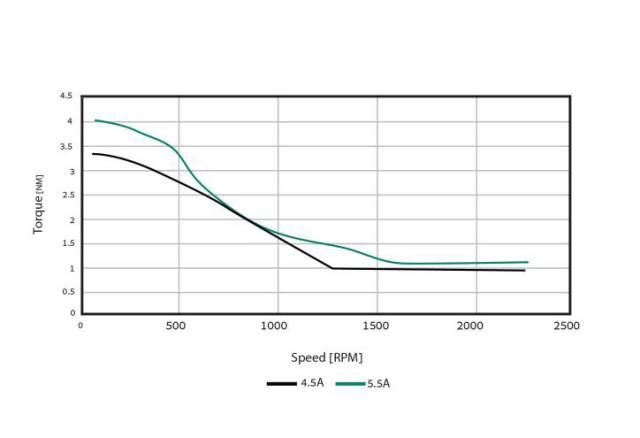
As de snelheid tanimt, nimt it koppel fan 'e stappenmotor ôf
4. Posysjonearring
Der binne wichtige ferskillen tusken stappenmotors en servomotors yn tapassingen dêr't de krekte posysje fan 'e masine altyd bekend wêze moat. Yn iepen-loop-bewegingsapplikaasjes dy't bestjoerd wurde troch stappenmotors, giet it kontrôlesysteem derfan út dat de motor altyd yn 'e juste bewegingssteat is. Nei't der lykwols in probleem ûntstiet, lykas in stilsteande motor fanwegen in fêstsittende komponint, kin de controller de werklike posysje fan 'e masine net witte, wat kin liede ta ferlies fan posysje. It sletten-loop-systeem fan 'e servomotor sels hat in foardiel: as er fêst komt te sitten troch in objekt, sil er it fuortendaliks detektearje. De masine sil ophâlde mei wurkjen en sil nea út posysje wêze.
5. Waarmte- en enerzjyferbrûk
Iepen-loop stappenmotors brûke in fêste stroom en jouwe in soad waarmte ôf. Sletten-loop kontrôle leveret allinich de stroom dy't nedich is foar de snelheidslus en foarkomt dêrtroch it probleem fan motorferwaarming.
Fergelikingsoersjoch
Servo-kontrôlesystemen binne it bêste geskikt foar hege-snelheidstapassingen mei dynamyske ladingferoaringen, lykas robotearms. Stapkontrôlesystemen binne oan 'e oare kant geskikter foar tapassingen dy't lege oant middelgrutte fersnelling en hege hâldkoppel fereaskje, lykas 3D-printers, transportbanden, subassen ensfh. Omdat stapmotors goedkeaper binne, kinne se de kosten fan automatisearringssystemen ferminderje as se brûkt wurde. Bewegingskontrôlesystemen dy't gebrûk meitsje moatte fan 'e skaaimerken fan servomotors, sille moatte bewize dat dizze djoerdere motors har gewicht yn goud wurdich binne.
Stapmotors mei sletten-loop kontrôle
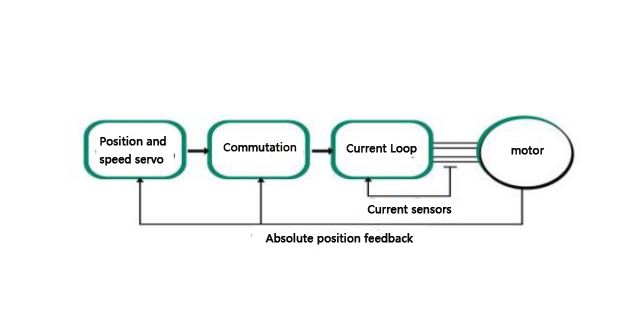
De stappenmotor mei yntegreare elektroanyske kontrôle is it lykweardich fan in twafase boarstelleaze DC-motor en kin posysje-luskontrôle, snelheidsluskontrôle, DQ-kontrôle en oare algoritmen útfiere. In ien-turn absolute encoder wurdt brûkt foar sletten-luskommutaasje, wêrtroch optimaal koppel by elke snelheid garandearre wurdt.
Leech enerzjyferbrûk en koel bliuwe
VIC-stapmotors binne tige enerzjy-effisjint. Oars as iepen-loop-stapmotors, dy't altyd op folle stroom wurkje en problemen mei waarmte en lûd feroarsaakje, feroaret de stroom neffens de werklike omstannichheden fan 'e beweging, bygelyks by fersnelling en fertraging. Lykas by servo's is de stroom dy't dizze stapmotors op elk momint ferbrûke, evenredich mei it werklike koppel dat nedich is. Omdat de motor en de yntegreare elektroanyske kontrôleboerd koeler rinne, kinne VIC-stapmotors hegere piekkoppels berikke dy't te fergelykjen binne mei servomotors.
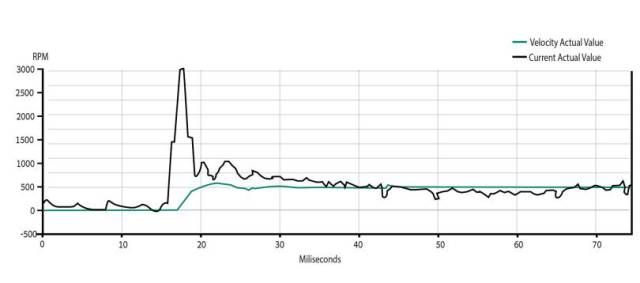
Sels by hege snelheden hawwe VIC-stapmotors minder stroom nedich
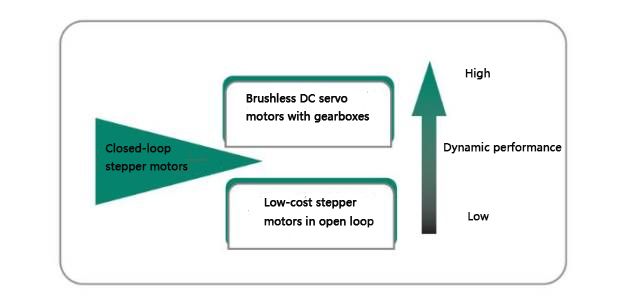
Oandreaun troch foarútgong yn sletten-looptechnology, binne stapmotors yn steat om hege prestaasjes, hege snelheidstapassingen te penetrearjen dy't earder allinich ta servomotors hearden.
Stapmotors mei sletten looptechnology
Wat as de foardielen fan sletten-loop servotechnology tapast wurde koene op stappenmotors?
Koe wy fergelykbere prestaasjes berikke mei servomotors, wylst wy noch altyd de kostenfoardielen fan stappenmotors realisearje?
Troch it kombinearjen fan sletten-loop kontrôletechnology soe de stappenmotor in wiidweidich produkt wurde mei de foardielen fan sawol servo- as stappenmotors tsjin lege kosten. Omdat sletten-loop stappenmotors wichtige ferbetteringen biede yn prestaasjes en enerzjy-effisjinsje, kinne se djoerdere servomotors ferfange yn in tanimmend oantal hege standert tapassingen.
It folgjende is in foarbyld fan in VIC-yntergreare stappenmotor mei ynbêde sletten-loop kontrôle om de prestaasjes en foar- en neidielen fan stappenmotors mei sletten-loop technology út te lizzen.
Presys oerienkommende prestaasjeeasken
Om genôch koppel te garandearjen om steuringen te oerwinnen en ferlerne stappen te foarkommen, moatte iepen-loop stappenmotors der meastentiids foar soargje dat it koppel teminsten 40% heger is as de wearde dy't fereaske wurdt troch de applikaasje. Closed-loop hjoeddeiske stappenmotors hawwe dit probleem net. As dizze stappenmotors stilsteane fanwegen in oerlêst, sille se de lading bliuwe hâlden sûnder koppel te ferliezen. Se sille trochgean mei wurkjen nei't de oerlêstbetingsten fuorthelle binne. Maksimum koppel kin garandearre wurde by elke opjûne snelheid en de posysjesensor soarget derfoar dat der gjin ferlies fan stap is. Closed-loop stappenmotors kinne dêrom spesifisearre wurde om presys te foldwaan oan de koppeleasken fan 'e relevante applikaasje sûnder de needsaak foar in ekstra marge fan 40%.
Mei iepen-loop stappenmotors is it lestich om te foldwaan oan hege direkte koppeleasken fanwegen it risiko fan ferlerne stappen. Yn ferliking mei konvinsjonele stappenmotors kinne VIC sletten-loop stappenmotors in heul rappe fersnelling, leech operasjoneel lûd en lege resonânsje berikke. Se kinne operearje op folle hegere bânbreedtes en poerbêste prestaasjes berikke.
Gjin kabinet
Toda yntegreart de oandriuwkontrôlekaart mei de motor, wêrtroch't de hoemannichte bedrading ferminderet en de ymplemintaasje-oplossing ferienfâldige wurdt. Mei toda kinne jo masines sûnder kasten bouwe.
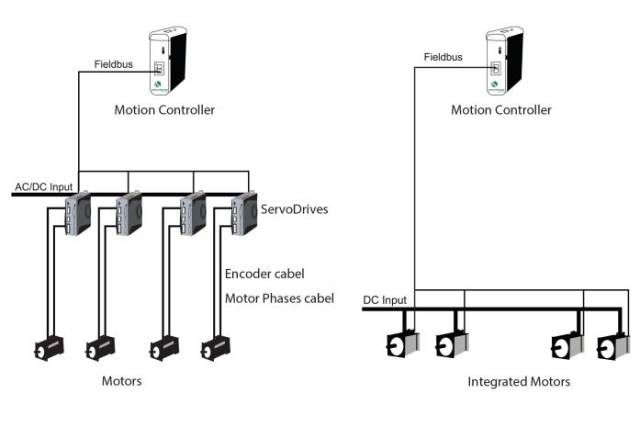
Yntegraasje fan elektroanika mei stappenmotors ferminderet kompleksiteit
Mei sletten-loop technology biede sletten-loop stappenmotors brûkers poerbêste krektens en effisjinsje, mei de prestaasjes fan in servomotor en de lege kosten fan in stappenmotor. Goedkeapere stappenmotors penetrearje stadichoan tapassingen dy't oars dominearre wurde soene troch djoere servomotors.
Pleatsingstiid: 10 april 2023